Robotic Sensing - Seminar
Im Seminar Robotic Sensing wurden die Einflüsse und Möglichkeiten von Sensortechnik auf den robotischen Fügeprozess untersucht. Dafür wurden diverse Sensortechniken, wie die Google-HoloLense, Xbos Kinect 360 und Bilderkennungen genutzt, um den robotischen Fügeprozess zu analysieren und optimieren. Dazu haben wir mit zwei UR10 Robotern am Fachgebiet DDU gearbeitet. Bestandteile waren neben der sensorischen Analyse robotischer Prozesse auch die Bedienung von Roboertern über Grasshopper3D.
In einen Workshop haben wir dann ein Berechnungsalgorithmus entwickelt, der Gegengewichte so verteilt, dass auskragende Strukturen schalungsfrei gebaut werden konnten und diesen auf einen exemplarischen Fügeprozess übertragen. Dazu haben wir sowohl rigid-body Simulationen als auch Pathplaning-Simulationen betrieben um den reibungslosen robotischen Prozess zu geehrleisten.
Die Ergebnisse und Erkenntnisse wurden anschließend als Paper auf der CAADRIA 2020 Konferenz veröffentlicht. Das Paper ist unter folgendem Link zu finden: http://papers.cumincad.org/data/works/att/caadria2020_022.pdf
Bearbeitende:
Timm Glätzer, Leon Wietschorke
SoSe 19 | FG DDU, Prof. Dr.-Ing. Oliver Tessmann, Bastian Wibranek, TU Darmstadt
CAADRIA2020
Robotic Sensing Seminar

Verschiebung des Schwerpunktes durch zusätzliche Masse
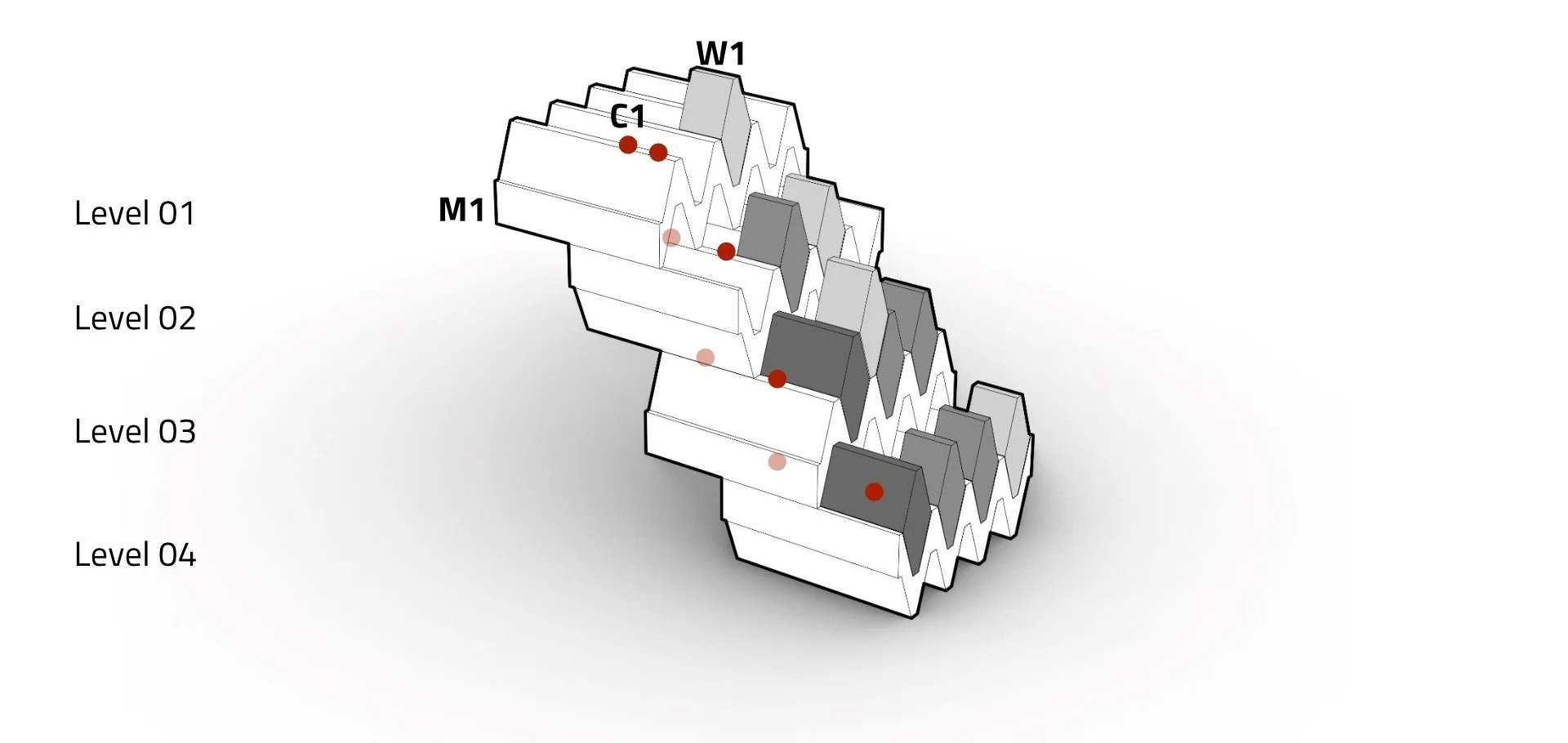
Verteilung der Schwerpunkte der einzelnen Elemente in einer Aggregation
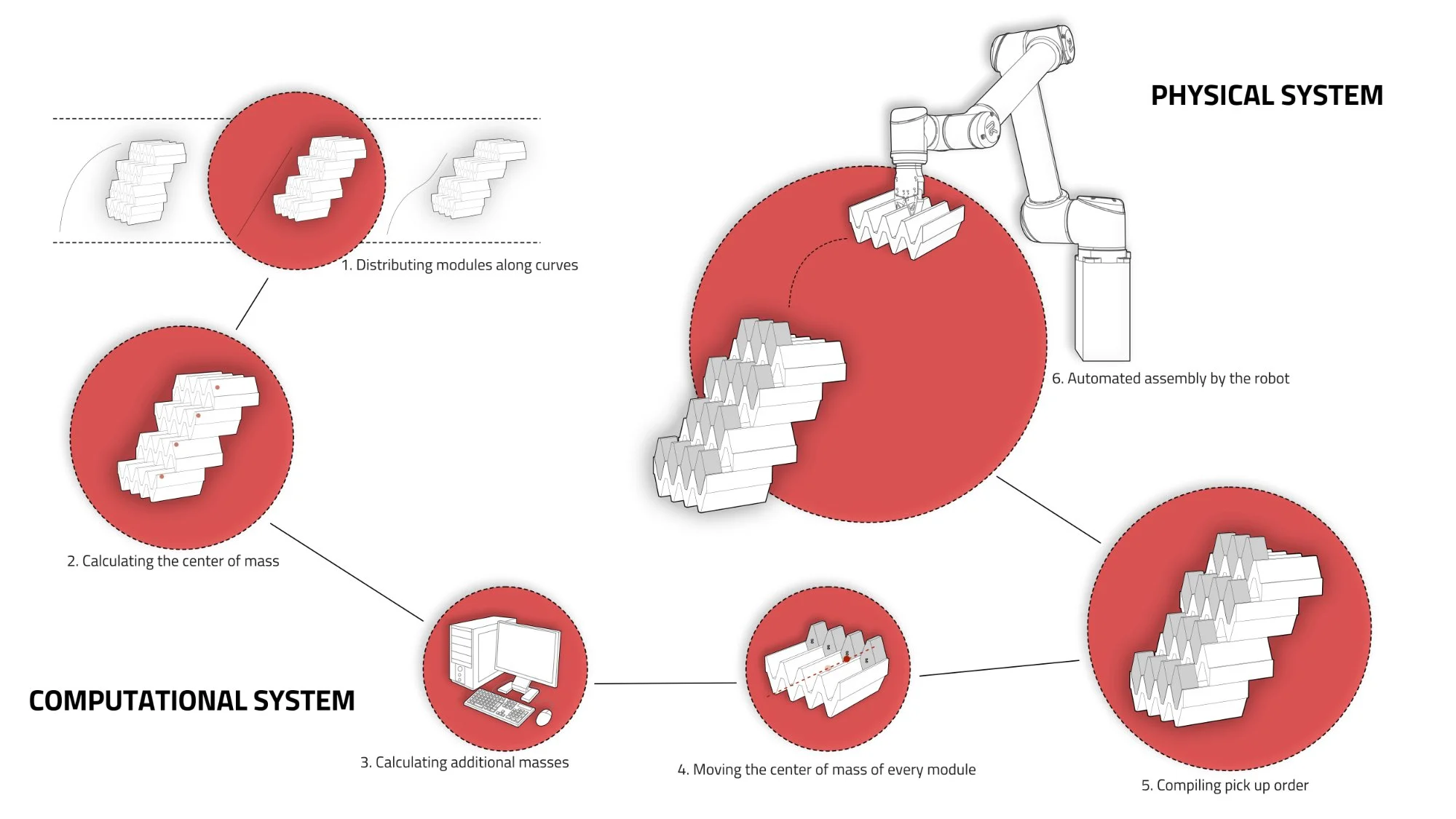
Prozessdiagramm von Kurve zur robotischen Fügung
Robotische Fügung
Das Video zeigt den robotischen Fügeprozess. Von der Pickup-Position der Gewichtsmodule nimmt der Roboter in richtiger Rheinfolge die entsprechenden Gewichtsmodule und platziert sie auf den roten Strukturelementen. Nach dem alle Gewichte platziert wurden, wird das nächste Strukturelement platziert, bis die Aggregation vollständig ist. Die Module sind dabei trocken gefügt, und genau berechnet, sodass bei Wegnahme oder Hinzugabe von Gewichten die Aggregation zusammenfällt.